Home
The Shuttle ZXX
by Rob Campbell  A few years ago I bought a "30 size" Hirobo Shuttle ZXX kit for a price I couldn't refuse. It has taken me until now to get everything
together and try it out.
A few years ago I bought a "30 size" Hirobo Shuttle ZXX kit for a price I couldn't refuse. It has taken me until now to get everything
together and try it out.This article has gone through several revisions as new discoveries were made over the last few weeks. First, some background... Power in its current configuration is an old Astro 40 Sport Wind brushed DC motor with twenty 1700 SCRs. I say old because it is the older style with only small vent holes in the end bells and it was purchased in '92. I had to wrestle this motor out of my trusty Ace 4-40 - it is painful to look at that plane without a motor! I've been sharing my experiences with a fellow from Texas who has quite a different setup. There doesn't seem to be a lot of information available on how to go about converting helicopters.  Main rotor dia. is 48.63" and flying weight is estimated at almost exactly 8 lbs. Calculations using Martyn McKinney's electric heli
spreadsheet and 20 cells indicate the main rotor rpm should be about 1400 rpm and it should take about 330 watts of mechanical power
to hover. Current draw from the battery should be a little over 18 Amps.
Main rotor dia. is 48.63" and flying weight is estimated at almost exactly 8 lbs. Calculations using Martyn McKinney's electric heli
spreadsheet and 20 cells indicate the main rotor rpm should be about 1400 rpm and it should take about 330 watts of mechanical power
to hover. Current draw from the battery should be a little over 18 Amps.The Shuttle is a pretty good conversion candidate for several reasons. It seems to be a good basic helicopter. I did some checking a while back and the Shuttle has a faster spinning tail rotor than most, so this helps with control for lower main rotor head speeds. It accommodates the Astro motor easily and has room for the batteries within its frame.  <-- Shuttle with Whisper
<-- Shuttle with Whisper Martyn's spreadsheet is a very useful tool for predicting electric heli performance. It was used to generate the data for all the graphs here. It is available for download from Ken Myers website. The graphs speak louder than words. Thanks Martyn! Interesting to note that the spreadsheet predicts better performance with 18 cells than with 20 and with blades with a smaller chord (to a point). The Astro 40 appears to operate very close to optimum efficiency at the hover current (about 18A). Hover time is calculated at about 5 1/2 minutes. It is worthy of note that the spreadsheet does not take into account the reduction in available voltage near the end of a flight and certain other losses. This will reduce the real-world hover time a bit.  The spreadsheet predicts equal hover times for 18 and 16 cells, but this may not be found in practice. The higher main blade angle of attack
with 16 cells will reduce the pitch "headroom" for hovering as the batteries are depleted. With 16 cells the lower rotor speed will also
provide poorer overall control and lift as the batteries are drained. I would suggest 18 to 20 cells instead. I know others have used
20 cells. It appears that if the number of cells is increased much more the velocity induced drag diminishes flight time.
The spreadsheet predicts equal hover times for 18 and 16 cells, but this may not be found in practice. The higher main blade angle of attack
with 16 cells will reduce the pitch "headroom" for hovering as the batteries are depleted. With 16 cells the lower rotor speed will also
provide poorer overall control and lift as the batteries are drained. I would suggest 18 to 20 cells instead. I know others have used
20 cells. It appears that if the number of cells is increased much more the velocity induced drag diminishes flight time.I have access to a little hobby lathe so I thought I'd have a go at making a coupling from the motor to the pinion that normally accommodates the clutch. I machined the clutch bell right off and used the remaining flange. The motor coupling was drilled and the flange tapped to accept small cap screws. My biggest worry with this set up was the possibility of misalignment. I'm breaking a basic rule here - two twin bearing shafts connected with an inflexible coupling. I ended up truing up the motor coupling by mounting it in the lathe and using the motor to turn the coupling. That seems to have made it perfectly true on the motor and no misalignment problems are evident.  <--Modified Clutch
<--Modified ClutchWith regard to motor heat dissipation, I borrowed Tom Cimato's idea posted June 30 on the e-flight mailing list for cooling things with a couple of small DC fans wired in series. I can also cool the throttle and some of the battery pack with the same air. I used a passive bimetal "Airpax" thermostat to switch on the fans when the motor bracket gets above 40 (C. The fans are always connected to power so I can leave it after a flight and the motor gets cooled off automatically. In reality, the motor thermal characteristics are such that it would be much better to blow air through the armature. A shaft driven fan available as an electric conversion accessory for the Kalt Baron 30 would be ideal.  I tried to avoid using a standard 5V regulator for the receiver by trying a very efficient switching regulator first. The regulator barely
gets warm with a 25V input. I measured the current draw at the regulator at about 0.22A quiescent (i.e. only the gyro active) and as high
as 1.40A with all servos operating rapidly. If the average current draw at the receiver is, say, 1A in flight, it is interesting to note that the
regulator is 80% efficient under these conditions, power dissipation is only about 1.25W and that the draw from the flight pack would
only be about 0.25A!
I tried to avoid using a standard 5V regulator for the receiver by trying a very efficient switching regulator first. The regulator barely
gets warm with a 25V input. I measured the current draw at the regulator at about 0.22A quiescent (i.e. only the gyro active) and as high
as 1.40A with all servos operating rapidly. If the average current draw at the receiver is, say, 1A in flight, it is interesting to note that the
regulator is 80% efficient under these conditions, power dissipation is only about 1.25W and that the draw from the flight pack would
only be about 0.25A!Any potential benefits turned out to be irrelevant because the switching regulator interfered with the receiver quite noticeably during a range check. The regulator switches at a very high frequency and this was obviously causing the problem. This type of regulator also shuts down completely below 7V so it isn't good for low cell count applications but it would have been OK in this case because the Shuttle would have been on the ground long before the main battery has a chance to reach 7V. With appropriate shielding and/or filtering this type of regulator may be useable but more investigation is required. Until then, I'll take the reliable (if wasteful) performance of a linear regulator.  <--Motor with coupling
<--Motor with coupling The heli is throttled with a Jeti 60. This was my first experience with one of these controllers and aside from having a narrow range from minimum to maximum throttle, it seems to be quite stable - a good thing in a heli! It has a brake but this is easily defeated with a supplied jumper. With a lot of fiddling and calming of nerves I was thrilled when I got this puppy to hover! The spreadsheet predicted main rotor hover pitch quite closely. This is the first time I have tried this size of heli and I must say it is smooth. There seems to be a lot more ground effect with the bigger chopper. This was also my first experience with a piezo gyro. It seems to have much more precise tail control than with the little mechanical Futaba G155 on my Whisper.  The two little thermostatically controlled DC fans do a good job cooling the motor but their reaction time lags behind the to motor heating
a lot. They don't switch on until after the heli has been hovering for at least a couple of minutes and they stay on for a few minutes after
a flight until the motor is just warm to the touch. They use so little current that their power-on status during hover goes unnoticed. I really
like this set up but as previously mentioned it would be a lot better to blow the air through the armature rather than across the motor.
The thermostat TO-220 package bolted to the motor mounting bracket. You could use just one of these 12V fans on a smaller heli...
The two little thermostatically controlled DC fans do a good job cooling the motor but their reaction time lags behind the to motor heating
a lot. They don't switch on until after the heli has been hovering for at least a couple of minutes and they stay on for a few minutes after
a flight until the motor is just warm to the touch. They use so little current that their power-on status during hover goes unnoticed. I really
like this set up but as previously mentioned it would be a lot better to blow the air through the armature rather than across the motor.
The thermostat TO-220 package bolted to the motor mounting bracket. You could use just one of these 12V fans on a smaller heli... <-- Rear view showing cooling fans
<-- Rear view showing cooling fans I started out with the stock semi-symmetrical blades. On E-Flight there was an article on the Astro 40 powered Kalt Baron 30 with optional electric power components. I have recently acquired a pair of the "Baron Alpha Elec" blades, P/N 39012. The blades have a larger chord (2" vs. 1 3/4") but have washout and are flat bottomed. I would think this would provide greater lifting ability for a given rotor rpm. These do give me more flying time but for reasons outlined below this became hard to measure. My guess is a flatter bottomed airfoil with washout (more pitch at the root) is the most efficient at lower head speeds for hover and normal flight. A washout blade will be a bit closer to true helical pitch. With this type of blades the heli seems to fly a bit longer and has a slightly mushier feel - a bit more like the Whisper. They are a dull grey in colour (a bit hard to see) but you can always use brightly coloured tracking tape. The blades were much better balanced out of the package than the stock blades and required much less work. 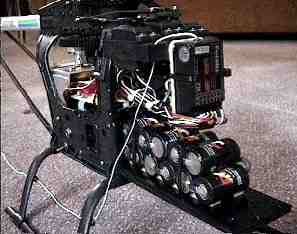 On an electric heli one can try throttling the motor to adjust for to reduce the torque transient during sudden collective pitch changes. I
am far from being an expert heli pilot but I have observed (and reacted to) this yaw transient caused by a rapid collective pitch change.
Keeping the rotor running at more constant speed with collective changes can significantly reduce the short-lived but unpleasant
reaction torque. In reality, the benefits of attempting this may be marginal - especially if you don't have a lot of power to spare and it
causes other performance penalties.
On an electric heli one can try throttling the motor to adjust for to reduce the torque transient during sudden collective pitch changes. I
am far from being an expert heli pilot but I have observed (and reacted to) this yaw transient caused by a rapid collective pitch change.
Keeping the rotor running at more constant speed with collective changes can significantly reduce the short-lived but unpleasant
reaction torque. In reality, the benefits of attempting this may be marginal - especially if you don't have a lot of power to spare and it
causes other performance penalties.To have any success with throttling you need a speed control with a smooth transition to full throttle. Some throttles sort of jump to full throttle from about 90% throttle. I've noticed this on airplanes and I think this is happening with my Shuttle heli throttle. I was able to do this on the Whisper to a small degree because but power was at a premium. Fortunately, electric motors fight to stay near their specific speed (speed predicted by the speed constant RPM/V) and require very little compensation for load changes compared with an IC engine. 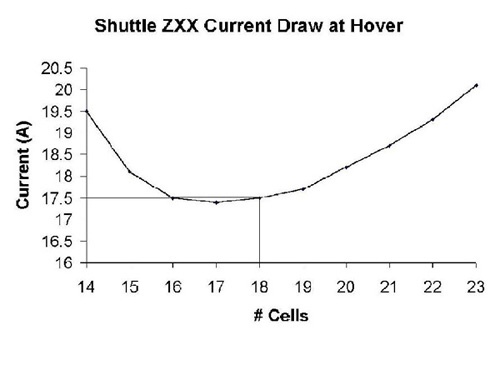 Unfortunately, the old Astro 40 could not be properly timed for the anticipated current draw. It was purchased in 1992 or so as a geared motor and it only has one pair of tapped holes for the motor thru-bolts. Timing was much closer to neutral than it should have been. During this initial period I was too lazy to take apart the motor to drill and tap a new pair of holes. This delayed an important discovery... 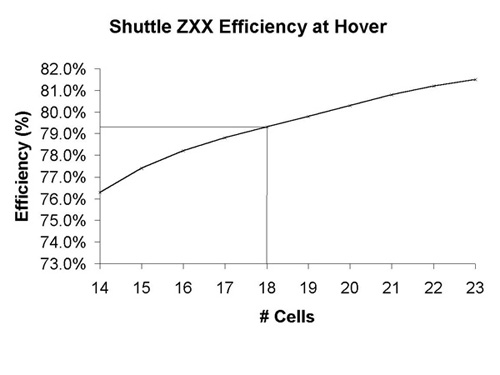 I was always leaving a large proportion of the charge in the cells (700 - 1000mAh) after a short 2 1/2 minute flight. If I let the motor cool down it would fly again. What was the problem? Was the motor getting too hot? This problem was interfering with my hovering practice and needed to be solved! This effect was reduced with the new blades suggesting they required less current at hover. 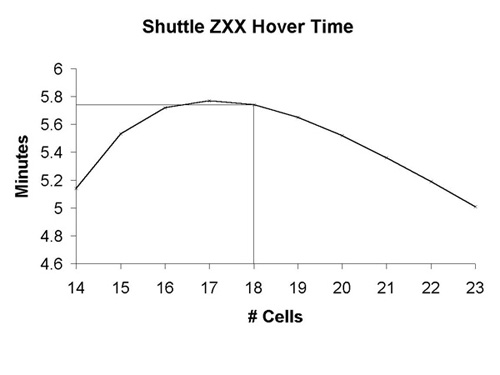 Varying flight times, erratic power, hot motor and thirst for current have mystified me. My first guess was that I had an intermittent turn-to-turn short in the windings. Current draw was about 23A at hover but only 18A was predicted. 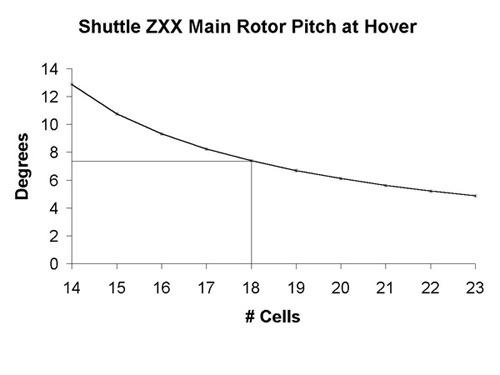 I was checking over the heli before going out to fly the other day and noticed that something in the motor was binding. I reluctantly decided to disassemble the motor from the airframe yet again. At this point, I thought that perhaps a brush had worn out, but when I took the motor apart I found that the brass housing in one of the brush holders had bent about 10 to 15 deg. and the housing was actually catching on the commutator! No wonder I was experiencing such weird behaviour. Wear on this brush was very asymmetrical. 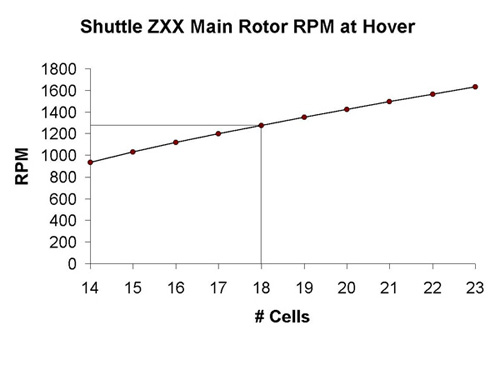 In retrospect, it is a wonder that the heli flew as well as it did. The bent brush holder probably explains the higher than normal current draw and the motor heating. The direction the holder was bent would have significantly retarded the timing for the one brush. That can't be good! I suspect the motor had this problem before I put it in the Shuttle because I had problems from the start. I think it just got worse with time. Based on a discussion with Marc Thomson, I've started to look at the Kontronik stuff out of Germany. If you go to www.kontronik.com and look up the 3SL 40 sensorless controller for brushless motors it looks perfect for electric helis. You can set it to maintain a constant RPM. Most setups also claim to achieve close to 90% efficiency. I want one. :-) Anyway, I think some basic repairs on the ol' Astro would allow me to combine the Shuttle's pleasant flying characteristics with some significantly longer flights for less money. On the other hand... Happy Hovering! Rob Campbell.
|
||||